


Программное обеспечение для 3D-моделирования Pando — Центр управления виртуальной сценой

Отображение осей 1:1: Зеркальное отображение 256+ серводвигателей в виртуальном пространстве
Предотвращение столкновений: Обнаружение рисков помех перед загрузкой
Художественный просмотр: Визуализация сложных движений с синхронизацией освещения и медиа
| Традиционный метод | Решение Pando 3D |
|---|---|
| Недели отладки на месте | офлайн виртуальная репетиция |
| Корректировки методом проб и ошибок | Точное выполнение с первого раза |
| Ограниченная предварительная визуализация | Полная 3D-симуляция шоу |
Будущее программирования сценического оборудования — от виртуального проектирования до безупречного исполнения
«Цифровые двойники для живых развлечений»
Pando 3D является пионером новаторского рабочего процесса, в котором:
✅ Виртуальные оси идеальное зеркало физические двигатели (через EtherCAT/PLC)
✅ Объектно-ориентированное управление заменяет ручное управление двигателем
✅ Полный жизненный цикл шоу охват от дизайна до производительности
| Традиционный подход | Преимущество Pando 3D |
|---|---|
| Прямое управление двигателем | Манипуляция формой объекта |
| Программирование по осям | Предустановки группового движения |
| Физические пробы и ошибки | Безрисковая виртуальная проверка |
Основные характеристики:
256+ физических синхронизаций двигателей
Предустановленные библиотеки движений (волны, спирали, подъемы)
Инструменты с матрицей/круговой решеткой для быстрой оснастки
Редактор временной шкалы
Анимация с помощью перетаскивания ключевых кадров
Визуализация многоосевой координации
Автоматическое обнаружение столкновений
Набор для отладки
Ограничение оповещений о превышении лимита с помощью автоматической коррекции
Анализ отклонения синхронизации
Сокращение времени отладки на месте на 90%
Поддерживаемые устройства:
Консоли с сенсорным экраном (21,5 дюйма, 1080P)
Планшеты и смартфоны (iOS/Android)
Настольные рабочие станции
Удаленное сотрудничество:
Облачный обмен проектами
Уровни многопользовательских разрешений
Совместное редактирование в реальном времени
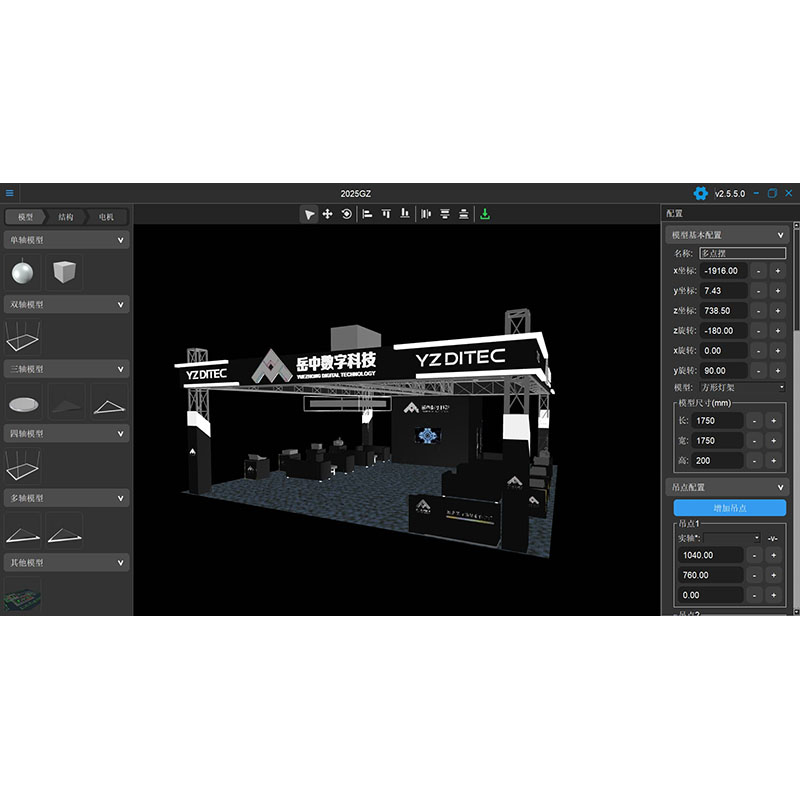
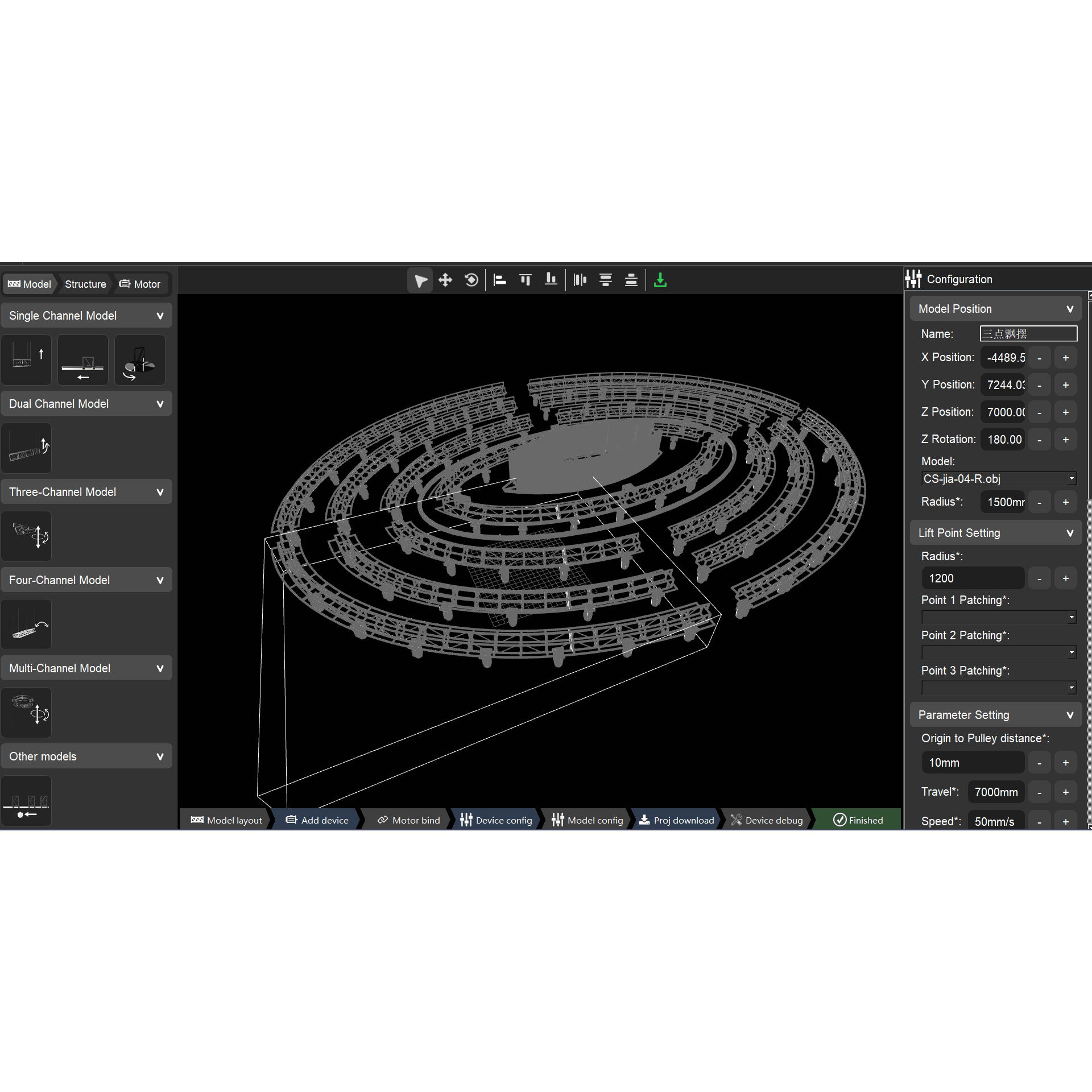
Конфигурационная платформа

Конфигурационная платформа предназначена для построения режима конструкции, для построения простого или сложного режима здесь есть простой способ.
В этом окне вы можете напрямую импортировать готовые 3D-модели;
Или вы можете перетащить какой-либо предустановленный режим, например, одиночные оси, двойные оси, 3 оси, 4 оси.
Следующие шаги:
1, перетащите режим;
2, установка параметра;
3, подберите двигатель к каждой оси.
4, сохранить.
Настройка параметров:

В меню «структура» можно установить взаимосвязь главного и подчиненного устройств.
Платформа отладки
(Расширенный доступ — только для авторизованного персонала)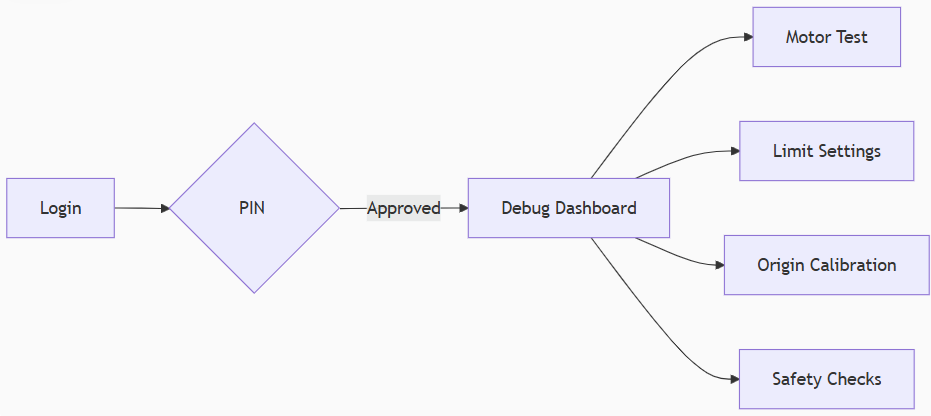
🔐 Ограниченный режим: Доступ высокого уровня только для системных инженеров
⚙️ Критические функции:
Тестовые запуски и калибровка двигателя
Конфигурация концевого выключателя
Установка исходной точки
Проверка цепи безопасности
✅ Беспроводное управление несколькими устройствами
Управление через смартфон/планшет/компьютер с телеметрией в реальном времени
Поддерживает подключение по Wi-Fi для полевых работ
✅ Мониторинг системы в реальном времени
Графическое отображение:
Положение двигателя/скорость/крутящий момент
Температура/напряжение/ток
Состояние сети EtherCAT
✅ Мгновенные оповещения о неисправностях
Push-уведомления на мобильные устройства:
Нарушения лимитов
Ошибки связи
Условия перегрузки
🛑 Двойная аутентификация (Пароль + Аппаратный ключ)
📊 Аудиторский след: Регистрирует все изменения параметров с меткой времени/идентификатором пользователя
Операционная платформа

Цель: Прямое управление двигателем для настройки/тестирования
Функции:
Прямой ввод позиции
Введите точные координаты (мм/°) для одноосного движения
Обратная связь по положению в реальном времени с разрешением 0,1 мм
Воспоминание о позе
Выполнять заранее сохраненные позиции («сигналы»)
Поддерживает 60 предустановок поз
Дизайн движения на основе временной шкалы:
Функции:
Редактирование ключевых кадров путем перетаскивания
Параметры интерполяции кривой:
Линейный
Безье (S-образная кривая)
Ступенчатая функция
Многоосевые синхронизационные маркеры
| DMX-канал | Функция |
|---|---|
| 1-16 | Выбор позы |
| 25-32 | Авто-Прог |
| Останавливаться |
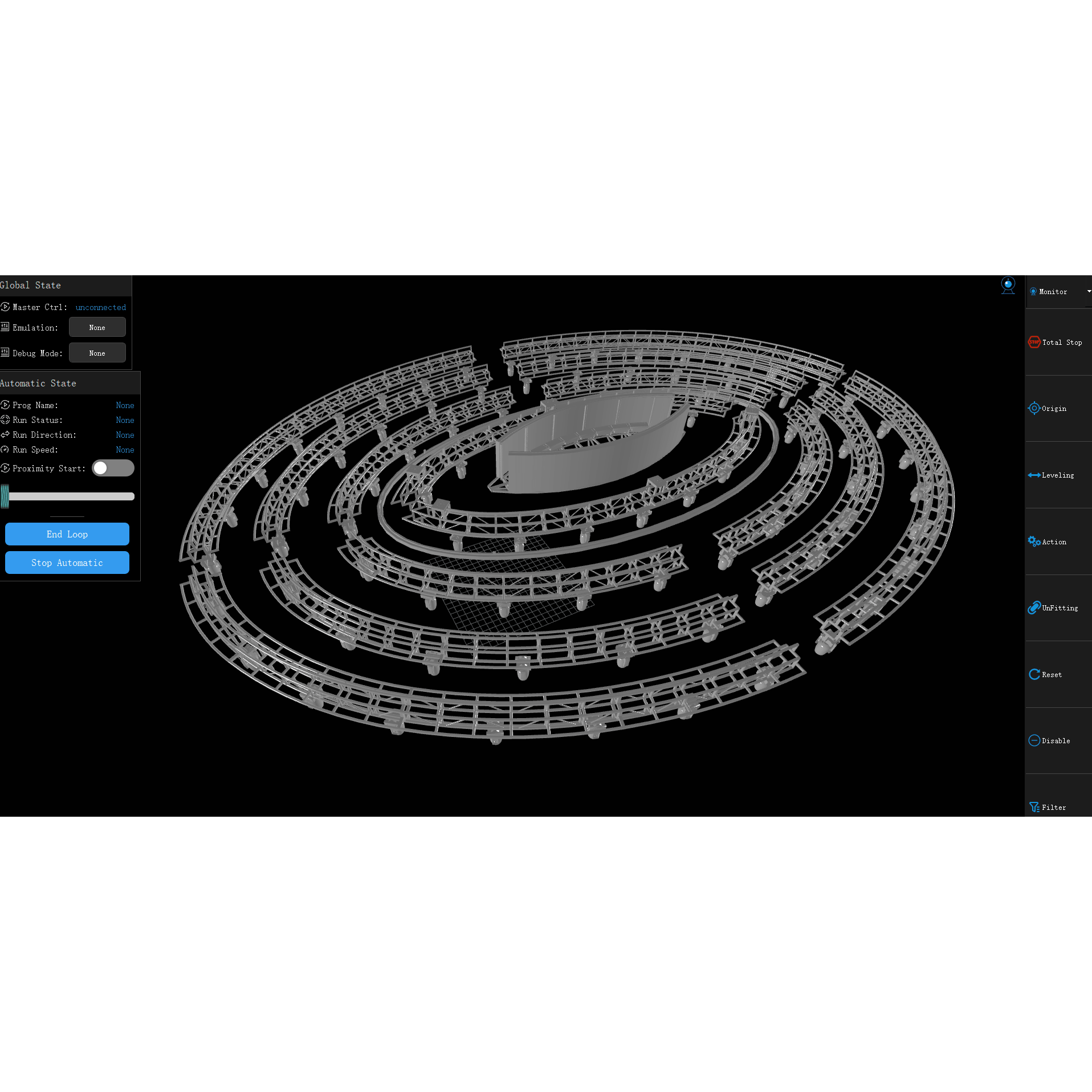
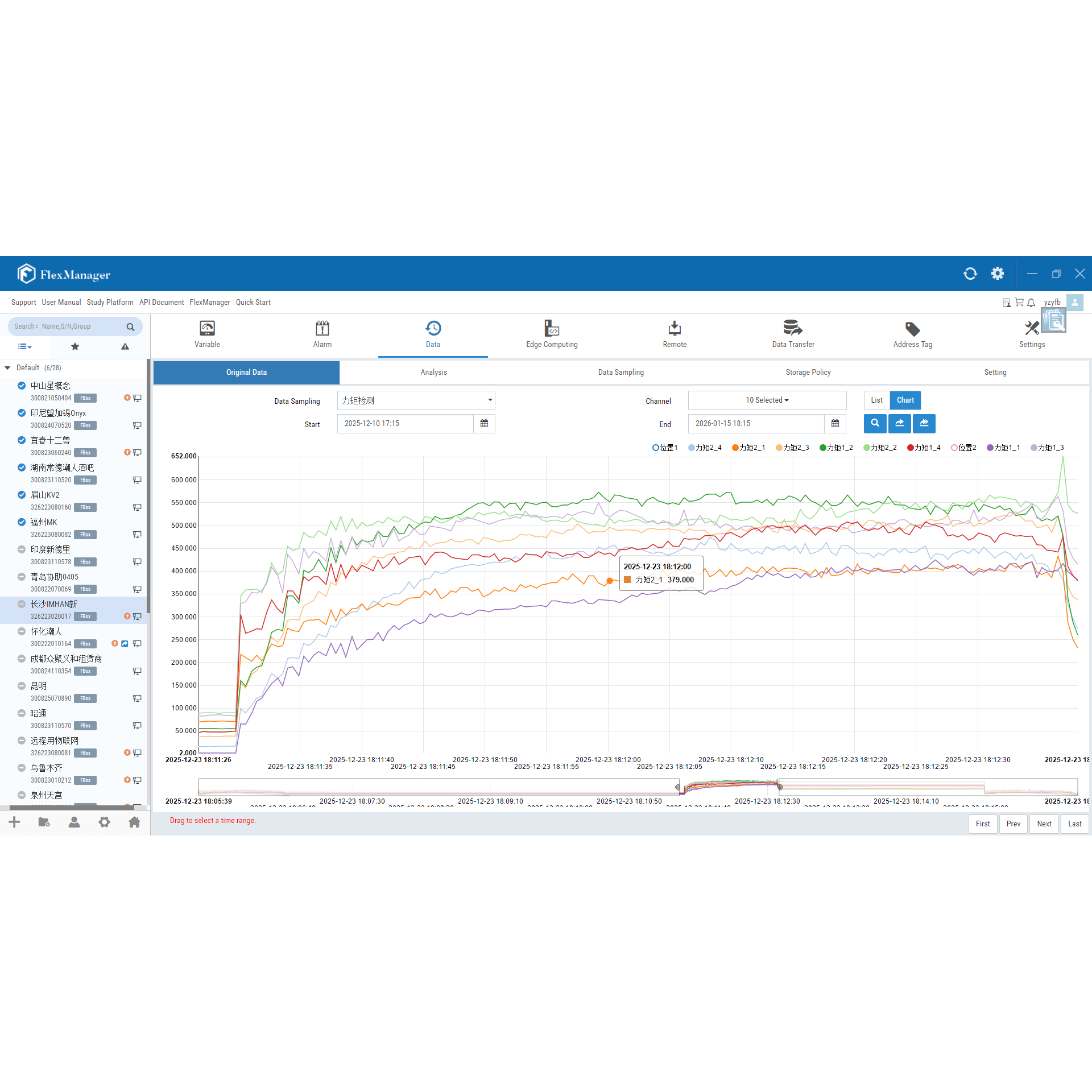
3D-просмотр и текущие данные

Просмотр синхронизированной 3D-модели, соответствующего статусу работы физического оборудования
Контролируйте основные параметры двигателя:
Позиция
Скорость
Коэффициент нагрузки
Температура
Значение веса
Коды тревоги
Объедините несколько двигателей в упрощенные виртуальные элементы управления:
Параметры подъема
Параметры наклона
Параметры вращения
Оптимизирует работу сложных механических систем
Включить «Защиту модели» при сохранении конфигураций
Автоматический анализ траектории:
Обнаруживает перекрывающиеся/конфликтующие пути движения
Обеспечивает безопасную эксплуатацию оборудования
Предоставляет предупреждения по технике безопасности перед выполнением
Виртуальные и физические данные о движении отображаются бок о бок
Мониторинг производительности в реальном времени
Автоматические оповещения об отклонениях
Технические преимущества
| Категория | Спецификация |
|---|---|
| Совместимость системы | Windows/Linux |
| Облачное хранилище | Программы и модели хранятся в облачной стандартизированной механической библиотеке |
| Интерфейс конфигурации | - Настройка топологии моторной шины - Конфигурация параметров движения/ограничения |
| Интерфейс программирования | - Предустановленное редактирование движения - Ключевые кадры временной шкалы |
| Интерфейс операции | - Программирование движения - Воспроизведение поз - Абсолютное позиционирование - Механический мониторинг |
| Хранение действий | 360 статических движений + 360 динамических движений на проект |
| Контрольная мощность | - максимум 256 осей - 128 осей в кольцевой сети |
| Поддержка контроллера | 1 подключение основного контроллера |
| Точность определения местоположения | 1 мм |
| Точность времени | 0,1 с |
| Поддержка языков | китайский/английский |

The Консоль BW революционизирует автоматизацию сцены, поскольку первый интегрированный терминал управления объединение:Управление движением промышленного уровня (точность 0,1 мм)Встроенная симуляция Pando 3D (виртуально-реальный замкнутый рабочий процесс)Архитектура, оптимизированная для аренды (развертывание по принципу «plug-and-play»)Основные преимущества1. Виртуальная и реальная синхронизация, «Отладка в 3D, выполнение с уверенностью»"Оффлайн-программирование: Предварительная визуализация сложных сцен в Pando 3DВиртуальные репетиции: Тестовые сигналы без перемещения физических механизмовРегулировка в реальном времени: Локальные настройки автоматически синхронизируются с симуляцией2. Проверенная надежностьОсобенностьТехническое преимуществоДвухрежимный аварийный остановСоответствует стандарту EN 60204-1 Cat.0 (отключение питания) и Cat.1 (контролируемая остановка)Волоконно-оптическая связьПередача сигнала без помех на расстояние более 2 км к главному контроллеру BW-MC™Интеграция DMX512Плавное управление с пультов управления освещением (ArtNet/sACN опционально)
Подробности
Основные инновации: «Моделируйте с уверенностью, выполняйте с точностью»Pando 3D производит революцию в автоматизации сцены, представляя собой первую полностью интегрированную систему виртуального управления, преобразующую физические сервооси (подъемники/лифты/поворотные платформы) в программируемые виртуальные элементы для безрисковой подготовки к съемкам.Ключевые особенности1. Технология цифровых двойниковОтображение осей 1:1: Зеркальное отображение 256+ серводвигателей в виртуальном пространствеПредотвращение столкновений: Обнаружение рисков помех перед загрузкойХудожественный просмотр: Визуализация сложных движений с синхронизацией освещения и медиа2. Преимущества рабочего процессаТрадиционный методРешение Pando 3DНедели отладки на местеофлайн виртуальная репетицияКорректировки методом проб и ошибокТочное выполнение с первого разаОграниченная предварительная визуализацияПолная 3D-симуляция шоу
Подробности
Интеллектуальное ядро системы автоматизации сцены Black WarriorОбзор системыРазработано YZ DITEC, BW-MC - это центральный управляющий мозг для профессиональной сценической техники, сочетающей в себе:✔ Многоосное синхронное управление (до 256 осей)✔ Точность до субмиллиметра (точность позиционирования ±0,5 мм)✔ Архитектура, оптимизированная для аренды (модульный и масштабируемый)Ключевые особенности1. Расширенное управление движениемна базе EtherCAT топология (частота обновления 1 мс)Виртуальное отображение осей для сложных траекторий2. Интеллектуальное управлениеДиагностика состояния двигателяОповещения о пороговых значениях температуры/нагрузки3. Экосистема безопасностиТройной резерв Цепи аварийной остановки (кат. 0/1/2)Регулировка динамического предела во время операции
Подробности
Прецизионный контроллер движения для автоматизации сценыОбзор продуктаThe Контроллер привода BW-DC представляет собой высокопроизводительный блок управления движением Система Черного Воина, разработанный компанией YZ DITEC для профессионального сценического оборудования. Разработан для работы с Главный контроллер сервопривода BW-MC (центральный процессор автоматизации сцены), он обеспечивает:Многоосевой прецизионный контроль для сервоподъемников/лебедокБыстрое развертывание и масштабируемые конфигурации для рынков арендыМониторинг в реальном времени серводвигателя абсолютного энкодераКлючевые особенностиПроизводительностьБезопасность и контроль✔ Гибкая компоновка: Управляет несколькими исполнительными устройствами с синхронизированным движением✔ Трехуровневая безопасность: Объединяет в себе аппаратные, программные и основные защитные функции контроллера✔ Высокая точность: Точность позиционирования до миллиметра для плавной автоматизации✔ Встроенный модуль безопасности: Защита от перегрузки, двойное управление тормозом, обнаружение пределов✔ Данные в реальном времени: Непрерывная обратная связь по положению двигателя, скорости и крутящему моменту✔ Конфигурация панели: Локальная настройка параметров двигателя и мониторинг состояния
Подробности
Надежное управление питанием для систем автоматизации Black Warrior1. Распределение питания профессионального уровняСбалансированное управление нагрузкой: Предотвращает фазовый дисбалансКаскадная конструкция: Возможность расширения для больших установок2. Повышенная безопасностьДвухуровневая защита:Магнитные тепловые выключателиАварийные выключателиВизуальные индикаторы: Светодиоды состояния фаз3. Строительство, готовое к туруВариант с кейсом для транспортировки:50-миллиметровая пенная прокладкаРазъемы со степенью защиты IP54
Подробности
 Tel : +86 13714472831
Tel : +86 13714472831 Email : ysstagetech@gmail.com
Email : ysstagetech@gmail.com No18, Wenchang road, Hailong street, Liwan district, Guangzhou, China
No18, Wenchang road, Hailong street, Liwan district, Guangzhou, China




 IPv6 ПОДДЕРЖИВАЕМАЯ СЕТЬ
Блог
| Карта сайта
| XML
| политика конфиденциальности
IPv6 ПОДДЕРЖИВАЕМАЯ СЕТЬ
Блог
| Карта сайта
| XML
| политика конфиденциальности
 русский
русский English
English español
español 한국의
한국의 العربية
العربية
